صمم مجموعة من طلاب كلية الهندسة بجامعة القاهرة قسم الكهرباء نموذجا جديدا للتحكم فى روبوت يعمل على خط الإنتاج والتشغيل للاستفادة من الطاقة مما يعزز من كفاءة خط سير التشغيل للمرحلة الإنتاجية، من خلال تصميم وتنفيذ دوائر إلكترونية متقدمة للتحكم في مخرجات الطاقة ومراقبتها بشكل دقيق لضمان سرعة فحص المرحلة الإنتاجية باستخدام التقنية الحديثة .
ويهدف المشروع إلى استخدام الروبوت فى تحميل ونقل وفرز المنتجات حسب المواصفات المطلوبة باستخدام الكاميرات وأجهزة الاستشعار للتعرف على المنتجات لتسهيل عملية الفرز والتعبئة والتحميل بكل سهولة وبشكل موسع لضمان عملية سير آمنة لمراحل التشغيل .
تحدث الطالب يوسف عماد المتناوى 24 عاما، والمقيد بالمرحلة النهائية بكلية الهندسة جامعة القاهرة قسم الكهرباء عن المشروع قائلا: يساهم هذا المشروع في الحفاظ على البيئة عن طريق تقليل الاعتماد على القوة البشرية باستخدام الروبوت المزود بالتقنية الحديثة لسرعة سير خط الانتاج والتشغيل بكل سهولة ويسر مما يجعله بديلاً مستداماً يمكنه تلبية احتياجات سير العمل بكفاءة بالاضافة الى الحد من الحوادث باستخدام الأنظمة الذكية .
واستكمل قائلا: بدأت عملية التصميم بوضع خطة عامة واختيار المواد المستخدمة من أدوات السلامة والأنظمة الإلكترونية المختلفة، وتركيب أنظمة التحكم الموجودة بالداخل لتنفيذ التصميم بالانظمة المتكيفة التى تجعلها أكثر أمانا لتجنب الحوادث وبعد الانتهاء قمنا باختبار ضبط الأداء وتحسين الكفاءة في ظروف مختلفة لضمان قدرتها على التحمل والأداء بالاشتراك مع فريق العمل المكون من: (علي مجدي عوض، يوسف عماد المتناوى، يوسف محمد رفعت، يوسف سيد عبدالرحمن، يوسف هاني تهامي)، وتحت إشراف أساتذة من كلية الهندسة بالجامعة .
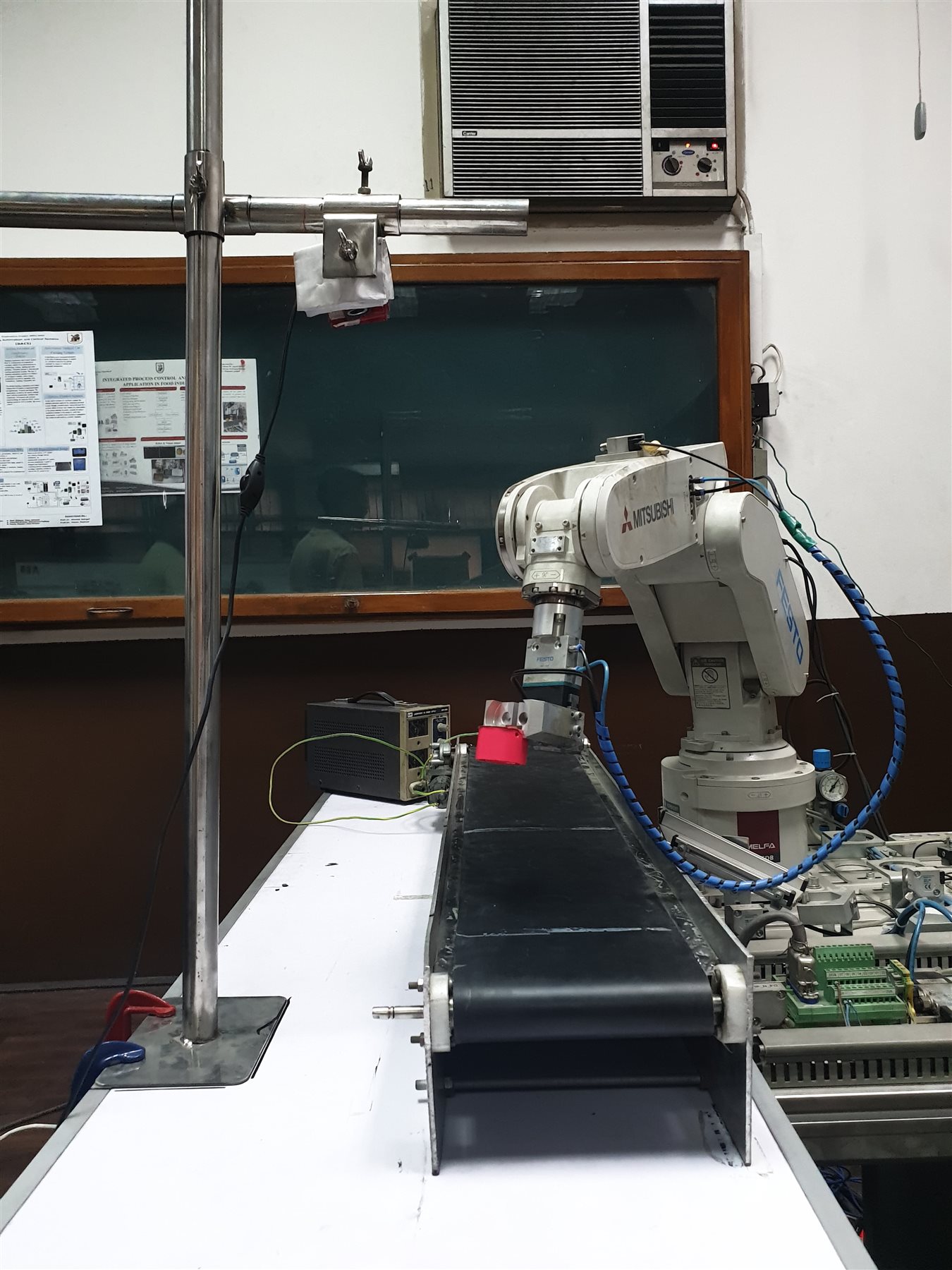
ويعد المشروع كتصميم وتنفيذ خط إنتاج يعمل آليا بدون تدخل بشري ويهدف الي تقليل الأخطاء البشرية لضمان جودة المنتج من الشكل، وذلك عن طريق ذراع آلي يعمل على تصنيف المنتجات بناء على أشكالها وألوانها وذلك باستخدام أجهزة ( PLC ) للتحكم في العملية كاملة ومستشعرات sensor proximity لتحديد تواجدها وكاميرا للتعرف على مكان ولون وشكل المنتج لترسل الاحداثيات الي الذراع الآلية للقيام بدورها بالتقاط المنتج ووضعه على السير المناسب ويتضمن المشروع عدة محركات وكهربية تعمل على تحريك السيور .
وتابع تم تنفيذ المشروع في معمل التحكم الآلى بقسم هندسة القوي الكهربية بهندسة القاهرة حيث يتواجد نظام ذراع الروبوت بالإضافة إلي المساحة اللازمة، كما يمكن استخدامها فى الأماكن التى يصعب على الإنسان العمل فيها وتحميل الأوزان الثقيلة وحمل المواد الإشعاعية والتى تسبب صعوبة فى النقل والتحميل الخاصة بالعامل البشري .